Роборыба с изменяемой жёсткостью раскрыла секреты скорости и манёвренности
Источник: Science Advances (2026). DOI: 10.1126/sciadv.aea1299
Почему одни рыбы, как тунец, достигают выдающейся скорости, а другие, например угри, превосходят в манёвренности? Исследовательская группа из Пекинского университета (PKU) разработала новую роботизированную платформу, которая проливает свет на эту классическую биомеханическую загадку.
Под руководством профессора Юй Цзюньчжи из Школы передового производства и робототехники команда создала мягкую роборыбу, способную переключаться между угреподобным (anguilliform) и тунцеподобным (carangiform) режимами плавания. Эта переконфигурируемая система позволила напрямую проверить, как жёсткость тела и распространение волны влияют на эффективность плавания — факторы, которые сложно измерить у живых рыб. Их выводы опубликованы в журнале Science Advances.
Как конструкция тела определяет плавание
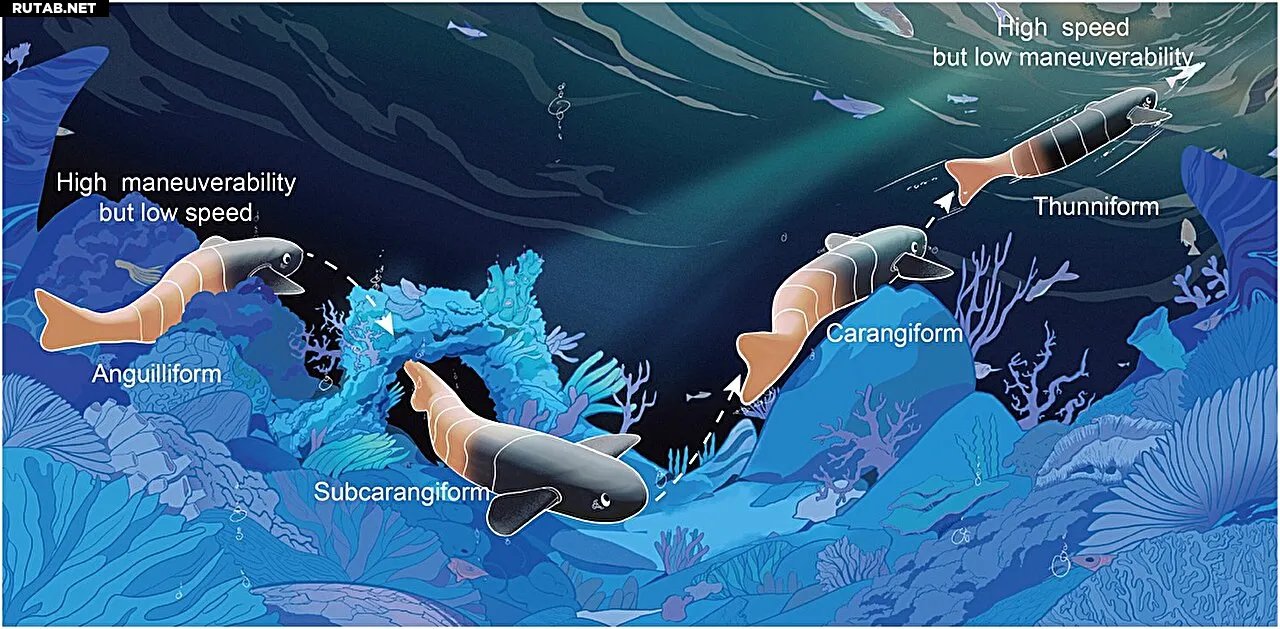
Рыбы используют волнообразные движения тела для плавания, но задействованная в этом процессе часть тела варьируется у разных видов. Угреподобные рыбы изгибают большую часть своего тела, что обеспечивает высокую манёвренность, но ограничивает скорость, в то время как тунцеподобные пловцы концентрируют движение возле хвоста, чтобы достичь быстрого и эффективного крейсерского движения. Прямое тестирование того, как жёсткость и распространение волны управляют этими различиями, было затруднительно как на живых животных, так и на предыдущих роботизированных моделях. Чтобы решить эту задачу, команда PKU разработала переконфигурируемую модульную мягкую роборыбу с контролируемой жёсткостью тела.
Понимание того, как рыбы балансируют между скоростью, эффективностью и маневренностью, является фундаментальной проблемой в биомеханике и биоинспирированной робототехнике. Это исследование предоставляет первую унифицированную экспериментальную платформу для прямого сравнения разных режимов плавания в контролируемых условиях. Помимо развития фундаментальной науки, выводы предлагают практические принципы проектирования подводных роботов, которые должны работать в сложных условиях, включая загромождённые водные пути, узкие проходы и открытую воду.
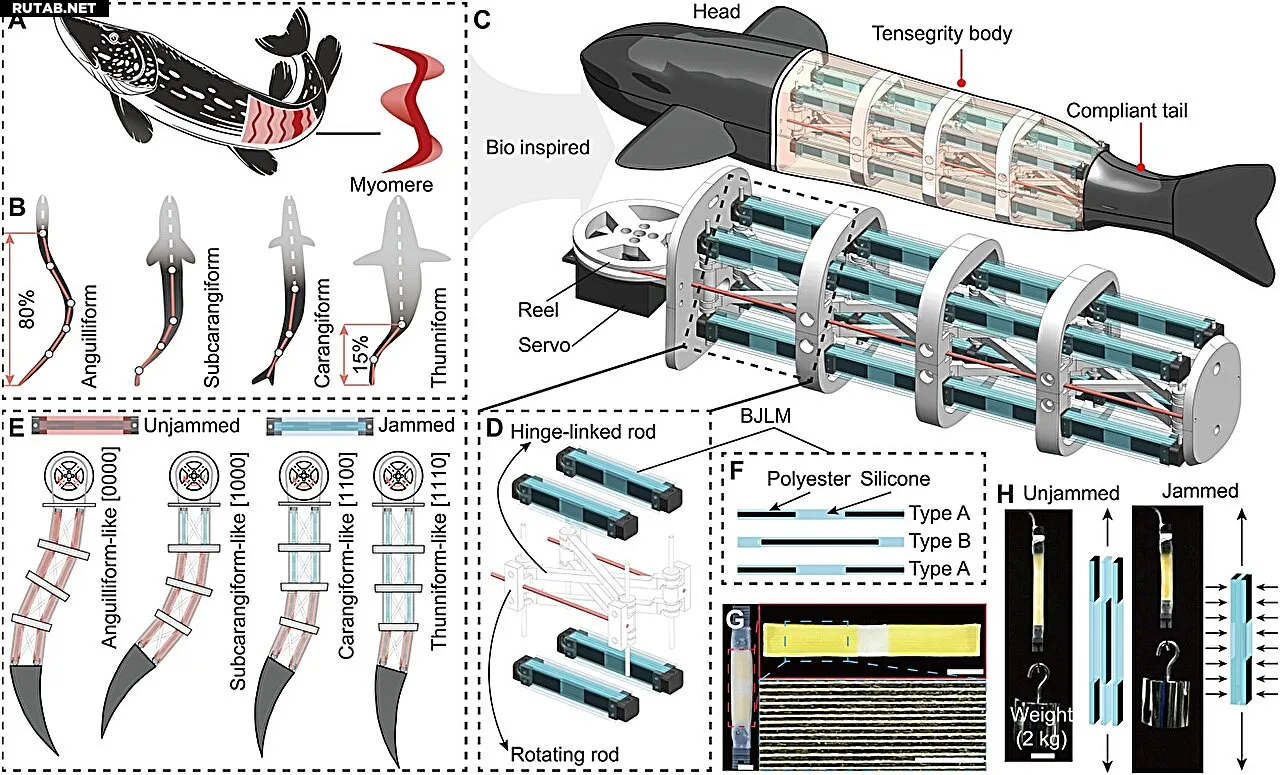
Дизайн многомодовой мягкой роборыбы. Источник: Science Advances (2026). DOI: 10.1126/sciadv.aea1299
Выявлены ключевые компромиссы производительности
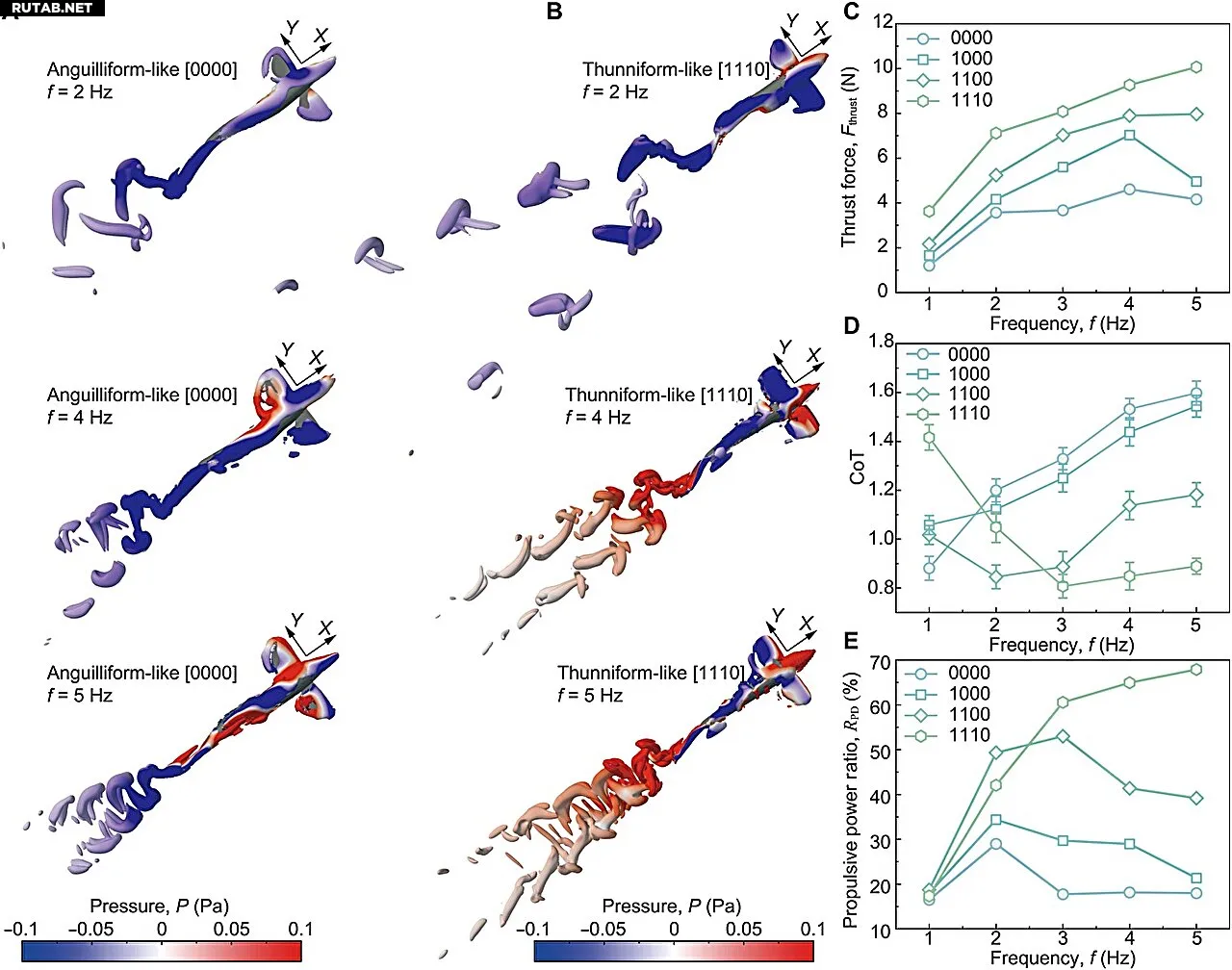
Роборыба достигла максимальной скорости плавания 1,24 длины тела в секунду при частоте 5 Гц в тунцеподобном режиме, в то время как угреподобный режим показал резкое снижение эффективности выше 4 Гц из-за недостаточной жёсткости и уменьшенной амплитуды хвоста. Скорость плавания определялась амплитудой взмаха хвоста и скоростью распространения волны по телу, которые зависели от распределения жёсткости вдоль тела.
В высокожёстком тунцеподобном режиме эффективная передача волны с длинами волн 0,75–1,05 длины тела поддерживалась на высоких частотах, что обеспечивало большее тяговое усилие. Вычислительное моделирование гидродинамики показало, что этот режим генерировал сильные, когерентные вихревые кольца на хвосте, тогда как угреподобный режим создавал фрагментированные следы и более высокое сопротивление возле головы. При 5 Гц тяга в тунцеподобном режиме была на 142% выше, в то время как угреподобный режим продемонстрировал превосходную манёвренность с минимальным радиусом поворота 0,26 длины тела.
Источник: Science Advances (2026). DOI: 10.1126/sciadv.aea1299
Значение для роботов следующего поколения
Благодаря динамическому переключению между режимами плавания роборыба преодолела традиционный компромисс между скоростью и манёвренностью. Тесты в узких каналах и на открытом воздухе показали, что многомодовая стратегия превосходит одномодовых роботов, подчеркивая потенциальные применения в экологическом мониторинге, подводных исследованиях и аварийно-спасательных работах.
По материалам: Peking University
Интересный факт: Идеи для подобных роботов часто черпаются из природы, и это направление называется «биомиметика». Например, в 2025 году другая группа исследователей представила мягкого робота-ската, способного «парить» в толще воды, имитируя движения своего биологического прототипа. Разработки в области мягкой робототехники открывают перспективы для создания медицинских имплантатов, протезов и исследовательских зондов, способных безопасно взаимодействовать с хрупкими биологическими системами.






0 комментариев