Учёные открыли нейронную основу стайного поведения животных
Исследователи из Констанцского университета (Германия) обнаружили, что синхронные движения в стаях животных возникают благодаря особой нейронной архитектуре мозга, а не слепому следованию поведенческим правилам.
Мохаммад Салахшур и Иэн Кузин разработали теоретическую модель, показывающую, что коллективное движение возникает естественным образом из-за синхронизации нейронной активности в кольцевых аттракторных сетях — круговых структурах нейронов, отслеживающих направление к объектам в пространстве.
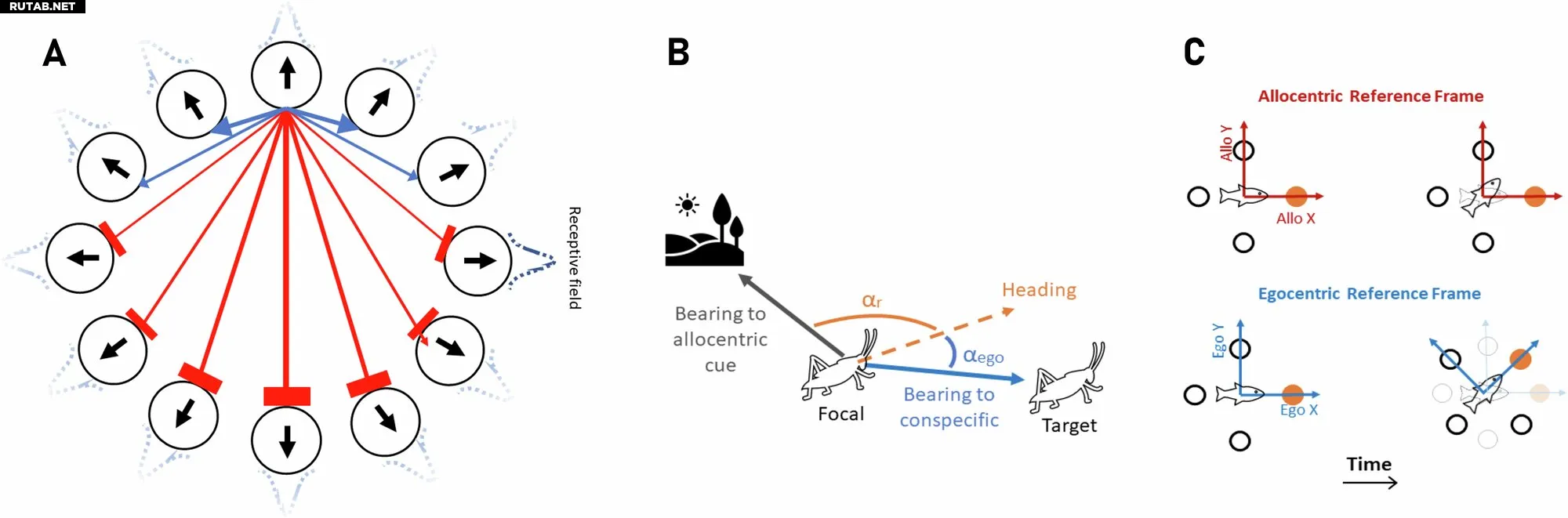
Эта модель, описанная в журнале Nature Communications, опровергает теорию 1970-х годов, согласно которой животные следуют простым «правилам поведения» — выравниваются с соседями, избегают столкновений и держатся рядом. Новая концепция «аллоцентрического стайного поведения» демонстрирует, что координация возникает, когда животные представляют направления друг друга относительно стабильных особенностей окружающей среды.
«Это элегантное решение. Вместо набора правил для каждого поведения животные используют гибкую встроенную систему, создающую сложность из простоты», — объясняет Салахшур.
Исследование также показало, что животные могут переключаться между аллоцентрическим (ориентированным на мир) и эгоцентрическим (ориентированным на собственное тело) представлением пространства. Быстрое переключение между этими режимами улучшает координацию и стабильность в группе.
«Гибкость — это секрет их адаптивности. Мозг не выбирает одну систему вместо другой, а использует обе для навигации в динамике движущегося роя», — говорит Кузин.
Открытие имеет широкие последствия — от понимания социальной эволюции до разработки роя роботов, которые смогут координироваться без GPS или центрального управления, имитируя двойную навигационную систему мозга.
ИИ: Это исследование кардинально меняет наше понимание коллективного поведения, показывая, что сложные групповые движения — это естественное следствие взаимодействия умов, разделяющих общее представление о пространстве. Открытие может революционизировать разработку распределённых роботизированных систем.



0 комментариев