Физически обоснованный ИИ научился раскрывать правила коллективного поведения
Исследователи из Сеульского национального университета и Университета Кёнхи сообщают о создании фреймворка для управления коллективным движением, таким как образование колец, сгустков, водоворотов и стай. Для этого они обучили физически обоснованный искусственный интеллект определять локальные правила, которые управляют взаимодействиями между отдельными особями.

Пример коллективного движения, известного как «стайное поведение», в природе. Стая байкальских чирков, напоминающая по форме дельфина, наблюдавшаяся в Южной Корее. Автор: Ким Донджо, Инженерный колледж Сеульского национального университета
Статья опубликована в журнале Cell Reports Physical Science.
Этот подход позволяет задавать условия, при которых упорядоченное состояние возникает из случайных начальных условий, и настраивать геометрические характеристики (средний радиус, размер кластера, размер стаи). Более того, после обучения на опубликованных GPS-треках реальных голубей модель выявила механизмы взаимодействия, наблюдаемые в реальных стаях.
Коллективное движение — это возникающее явление, при котором множество самодвижущихся особей (птицы, рыбы, насекомые, роботы, даже толпы людей) создают крупномасштабные структуры без какого-либо централизованного принятия решений. Каждая особь реагирует только на ближайших соседей, однако группа демонстрирует согласованное коллективное движение. Анализ того, как простые локальные взаимодействия порождают такой глобальный порядок, является сложной задачей, поскольку эти системы зашумлены и нелинейны, а восприятие часто является направленным.
Обучение локальным правилам с помощью физически обоснованного ИИ
Чтобы решить эти задачи, команда построила нейронные сети, которые подчиняются законам динамики и обучаются на простых характеристиках структур, а при наличии — на экспериментальных траекториях.
Нейросети выводят два основных типа локальных правил взаимодействия: правила, основанные на расстоянии (которые задают интервалы), и правила, основанные на скорости (которые выравнивают направление движения), а также их комбинацию. Команда также показала, что самодвижущиеся агенты, следующие этим правилам, воспроизводят целевые коллективные структуры с заданными геометрическими характеристиками.
Примеры включают в себя регулировку радиуса кольца, размера кластера в сгустках и режима вращения (одиночного или двойного) в водовороте; индуцирование непрерывных переходов между различными коллективными режимами; и достижение движения вблизи препятствий и в ограниченных областях.
Тот же фреймворк можно адаптировать к коротким сегментам реальных траекторий, включив анизотропное поле зрения, что дает законы взаимодействия, согласующиеся с иерархией «лидер-ведомый», наблюдаемой в природе.
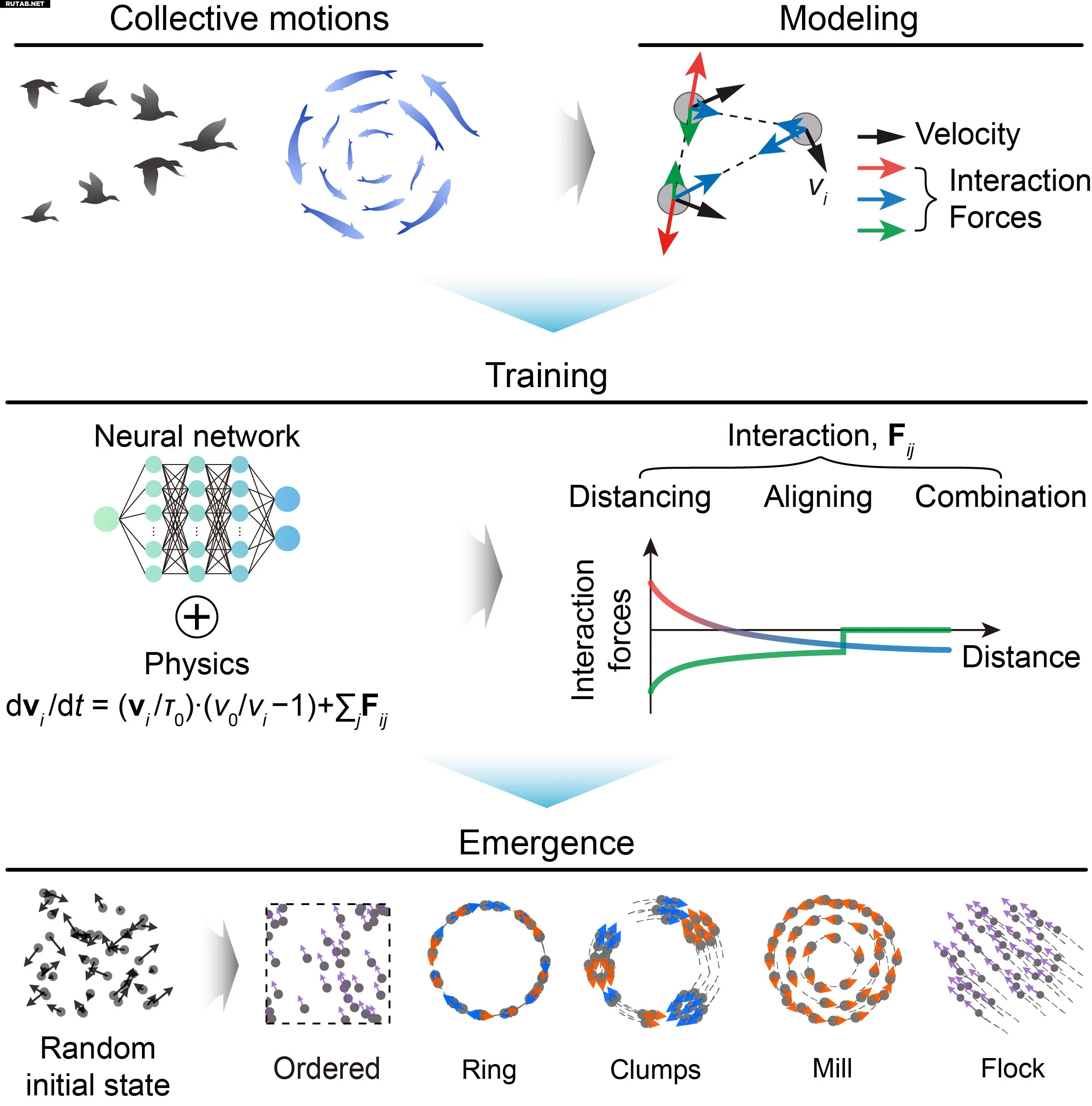
Схема общего процесса обучения нейронной сети. Автор: Cell Reports Physical Science
Открытие новых возможностей в коллективном поведении и робототехнике
Превращая коллективное поведение в нечто, что можно расшифровать, этот подход предлагает практические инженерные и научные преимущества. В робототехнике он предоставляет план для программирования роев дронов и наземных роботов, чтобы они формировали и меняли формации по требованию.
В естественных науках это помогает количественно определить, какие локальные взаимодействия достаточны для объяснения наблюдаемого стайного поведения, позволяя проверять гипотезы о сенсорных диапазонах и силе выравнивания.
В более широком смысле, метод может направлять разработку активных материалов, которые самоорганизуются в целевые формы, и помогать генерировать реалистичные синтетические наборы данных для изучения сложных децентрализованных систем.
Больше информации: Dongjo Kim et al, Commanding emergent behavior with neural networks, Cell Reports Physical Science (2025). DOI: 10.1016/j.xcrp.2025.102857
Источник: Seoul National University
ИИ: В 2025 году подобные исследования открывают путь к созданию действительно интеллектуальных роевых систем, которые могут применяться не только в логистике или разведке, но и, например, в экологическом мониторинге или даже в арт-инсталляциях, где сложное поведение возникает из простых правил.



0 комментариев