Astrobee научился перевозить мягкие грузы на МКС с помощью нового симулятора
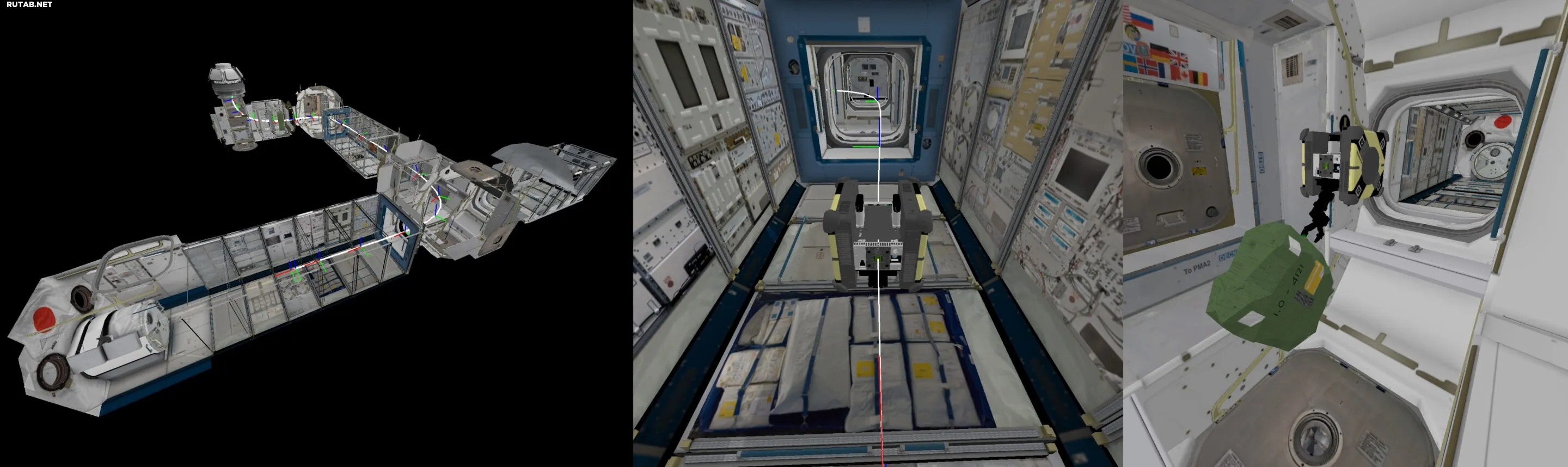
Слева: симуляция среды МКС с оптимальной траекторией (белая линия). В центре: Astrobee следует по траектории. Справа: робот готовится транспортировать деформируемый груз через узкий коридор. Автор: Morton et al
Роботизированная система Astrobee, разработанная NASA для помощи астронавтам на МКС, получила новый инструмент для работы с мягкими грузами. Исследователи из Стэнфорда, Кембриджа и NASA Ames создали симулятор Pyastrobee, который обучает робота безопасной транспортировке деформируемых объектов в условиях невесомости.
Основная проблема Astrobee заключалась в работе с мягкими грузовыми мешками из винила, чья форма меняется при контакте. Новый симулятор на базе физического движка Bullet точно моделирует эти изменения, а интеграция с Python позволяет быстро тестировать алгоритмы управления.
«Для будущих космических станций без постоянного экипажа автономные роботы станут критически важны», — пояснил ведущий автор исследования Дэниел Мортон. Pyastrobee использует метод «предиктивного управления на основе выборки» (MPC), который учитывает взаимодействие робота с деформируемым грузом.
Проект с открытым исходным кодом уже доступен на GitHub. В планах разработчиков — оптимизация вычислений и эксперименты с командной работой нескольких роботов Astrobee для повышения стабильности транспортировки.
Дополнительно: Daniel Morton et al, Deformable Cargo Transport in Microgravity with Astrobee, arXiv (2025). DOI: 10.48550/arxiv.2505.01630
ИИ: Интересно, что подобные разработки могут найти применение не только в космосе, но и в земных условиях — например, для автономной транспортировки медицинских грузов в стеснённых условиях больниц. Открытый код симулятора также ускорит исследования в области робототехники.





0 комментариев