Марсоход Zhurong получил новые возможности для исследований
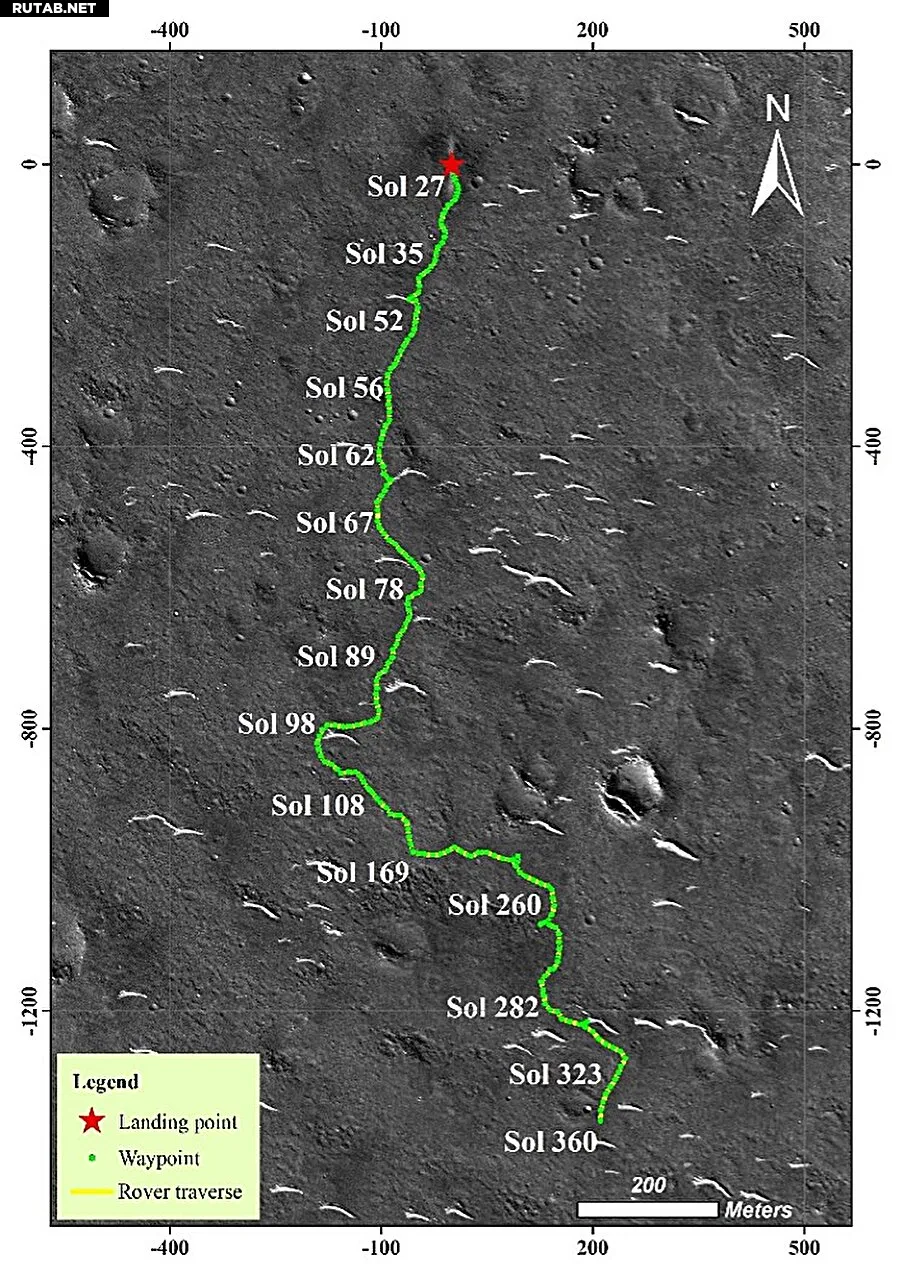
Траверс марсохода Zhurong, полученный с помощью визуальной локализации. Автор: AIR
Совместная исследовательская группа улучшила методы визуальной локализации и топографического картирования, которые позволяют китайскому марсоходу Zhurong осуществлять навигацию и проводить научные исследования на Марсе. Эти методы сыграли решающую роль в успехе миссии Tianwen-1, которая является первой независимой попыткой Китая исследовать межпланетное пространство.
Это исследование было опубликовано в журнале IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing. Исследователи связаны с Институтом аэрокосмической информации Китайской академии наук и Пекинским центром управления аэрокосмическими объектами.
Китайская миссия Tianwen-1, запущенная в июле 2020 года, была направлена на картографирование поверхности Марса, анализ геологических структур и изучение климата и окружающей среды планеты. Ключевым компонентом этой миссии был марсоход Zhurong, который приземлился на юге Utopia Planitia 22 мая 2021 года. Способность марсохода пересекать марсианскую местность и проводить научные исследования на месте в значительной степени зависела от точной локализации и топографического картирования с высоким разрешением.
В этом исследовании ученые разработали несколько инноваций для улучшения навигационной системы Zhurong, включая методы коррекции виньетирования и онлайн-калибровки мачты камеры, что улучшило качество изображений, полученных навигационными и ландшафтными камерами марсохода. Эти усовершенствования позволили создать 3D-топографические карты высокого разрешения с точностью до сантиметра, что имело решающее значение для анализа препятствий и планирования маршрута марсохода.
Кроме того, благодаря интеграции визуальной локализации на разных участках и сопоставлению цифровых ортофотокарт исследователи уточнили местоположение марсохода с точностью 0,50% относительно длины траверса, что значительно лучше точности бортовой системы счисления пути марсохода, составляющей 3,11%.
Исследование показало, что марсоход Zhurong проехал в общей сложности 2009 метров, что на 88 метров больше, чем 1921 метр, зафиксированный бортовым одометром. Это расхождение было вызвано проскальзыванием колес из-за нисходящего уклона траверса, что подчеркивает важность точной локализации для понимания движения марсохода на Марсе.
Кроме того, топографические карты высокого разрешения способствовали детальному анализу геологических особенностей, таких как поперечные Эолийские хребты и ударные кратеры, что дало ценную информацию о геологической истории Марса и климатической эволюции.
Больше информации: Wenhui Wan et al, Visual Localization and Topographic Mapping for Zhurong Rover in Tianwen-1 Mars Mission, IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing (2025). DOI: 10.1109/JSTARS.2025.3540377
Источник: Chinese Academy of Sciences








0 комментариев