Новый метод исследования других планет роботами

Был выбран вездеход с качающейся тележкой, поскольку он имеет небольшой форм-фактор и использует готовые компоненты. Автор: Sarah Swinton.
Хотя за последние десятилетия робототехники разрабатывали все более сложные системы, обеспечение того, чтобы эти системы могли автономно работать в реальных условиях без сбоев, часто оказывается сложной задачей. Это особенно сложно, когда эти роботы предназначены для использования в сложных условиях, включая космос и другие планеты.
Исследователи из Университета Глазго недавно разработали новую методологию, которая позволит командам из нескольких марсоходов автономно и надежно исследовать другие планеты. Этот метод, представленный в статье, предварительно опубликованной на arXiv, включает данные, полученные из различных источников, включая данные изображений, карты и информацию, собранную датчиками, для планирования эффективных маршрутов для разных роботов в команде.
Суи́нтон (англ. Swinton) — топоним и фамилия. Википедия
Основной целью недавнего исследования Суинтон и ее сотрудников было эффективное решение давней исследовательской проблемы в области робототехники: эффективное решение автономных миссий по исследованию планет с участием нескольких роботов. Для этого команда разработала планировщик миссий с несколькими марсоходами, который позволяет команде из нескольких марсоходов, небольших роботов, предназначенных для исследования космоса, автономно, безопасно и эффективно исследовать участок марсианской поверхности.
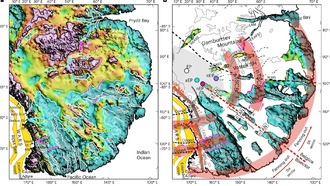
«Предложенный нами метод позволяет команде роботов автономно исследовать поверхность Марса, пройдя два ключевых этапа: создание карты и планирование миссии», — объяснил Суинтон. «Во-первых, карта окружающей среды создается с использованием данных Марсианского разведывательного орбитального аппарата. Мы специально использовали данные из кратера Джезеро, где в настоящее время работает марсоход НАСА «Персеверанс».
Распределение вероятностей — это закон, описывающий область значений случайной величины и соответствующие вероятности появления этих значений. Пусть задано вероятностное пространство ( Ω , F , P ) {\displaystyle (\Omega ,{\mathcal {F}},\mathbb {P} )} , и на нём определена случайная величина X : Ω → R {\displaystyle X:\Omega \to \mathbb {R} } . В частности, по определению, X {\displaystyle X} является измеримым отображением измеримого пространства ( Ω , F ) {\displaystyle (\Omega ,{\mathcal {F}})} в измеримое пространство ( R , B ( R ) ) {\displaystyle (\mathbb {R} ,{\mathcal {B}}(\mathbb {R} ))} , где B ( R ) {\displaystyle {\mathcal {B}}(\mathbb {R} )} обозначает борелевскую сигма-алгебру на R {\displaystyle \mathbb {R} } . Тогда случайная величина X {\displaystyle X} индуцирует вероятностную меру P X {\displaystyle \mathbb {P} ^{X}} на R {\displaystyle \mathbb {R} } следующим образом: P X ( B ) = P ( X − 1 ( B ) ) = P ( { ω : X ( ω ) ∈ B } ) , ∀ B ∈ B ( R ) . Википедия
«Эти точки могут представлять собой камни, из которых мы хотим, чтобы марсоходы взяли образцы», — сказал Суинтон. «После создания этой карты наш планировщик миссии исследует окружающую среду, чтобы определить эффективный маршрут, который повысит вероятность обнаружения интересующих точек. Затем определяется скоординированный набор безопасных путей для каждого члена команды марсохода».
Планировщик миссий с несколькими вездеходами, разработанный Суинтон и ее коллегами, имеет различные преимущества по сравнению с ранее разработанными подходами. Помимо определения местности, по которой марсоходы могут безопасно перемещаться, и планирования маршрутов для их автономной работы, планировщик также предоставляет информацию о том, где могут находиться объекты, представляющие научный интерес.
«Наша команда марсоходов способна безопасно и эффективно обыскать весь участок миссии площадью 22 500 м 2 за относительно короткий период времени», — сказал Суинтон. «Стоит также отметить, что каждый марсоход преодолевает расстояние в автономном режиме, сравнимое с текущим рекордом «самого большого расстояния, пройденного без контроля со стороны человека», установленного планетарным исследовательским марсоходом. Наша работа также показала, что эффективность поиска была повышена за счет использования марсохода. команды над одним марсоходом».
Суинтон и ее коллеги оценили свой подход к картированию и планированию в серии тестов и симуляций, проведенных с использованием набора случайно сгенерированных карт распределения вероятностей. Их результаты оказались весьма многообещающими: их метод позволил команде из пяти марсоходов автономно исследовать территорию площадью 22 500 м 2 на Марсе примерно за 40 минут.
Хотя до сих пор планировщик применялся для исследования Марса, его можно применить и к другим миссиям, выходящим за рамки исследования планет. Например, это также может помочь координировать усилия нескольких наземных роботов во время поисково-спасательных операций, просто используя карту интересующей среды и карту распределения вероятностей, на которой отмечены места, где роботы с наибольшей вероятностью встретят людей, которых нужно спасти. или кому нужна помощь.
В своих следующих исследованиях Суинтон и ее коллеги планируют продолжить разработку и тестирование своей методологии, а также работать над другими вычислительными инструментами для поддержки автономной работы нескольких роботов. Эти инструменты также будут включать методы повышения отказоустойчивости команд, состоящих из нескольких роботов.
«Последствия неисправностей и сбоев вызывают серьезную озабоченность в миссиях по исследованию планет», — добавил Суинтон. «Чтобы команда роботов-исследователей планет считалась заслуживающей доверия, роботы должны иметь возможность диагностировать неисправности у себя и/или у своих товарищей по команде. Только после того, как неисправности были диагностированы, можно предпринять действия по восстановлению, чтобы смягчить любое влияние, которое неисправность оказывает на миссию. результаты».
Больше информации: Sarah Swinton et al, A Novel Methodology for Autonomous Planetary Exploration Using Multi-Robot Teams, arXiv (2024). DOI: 10.48550/arxiv.2405.12790



0 комментариев