Надувная роботизированная рука из ткани собирает яблоки
Исследователи из Университета штата Вашингтон (WSU) разработали недорогую и простую роботизированную руку для сбора яблок, которая в будущем может помочь в уборке урожая и других сельскохозяйственных работах.
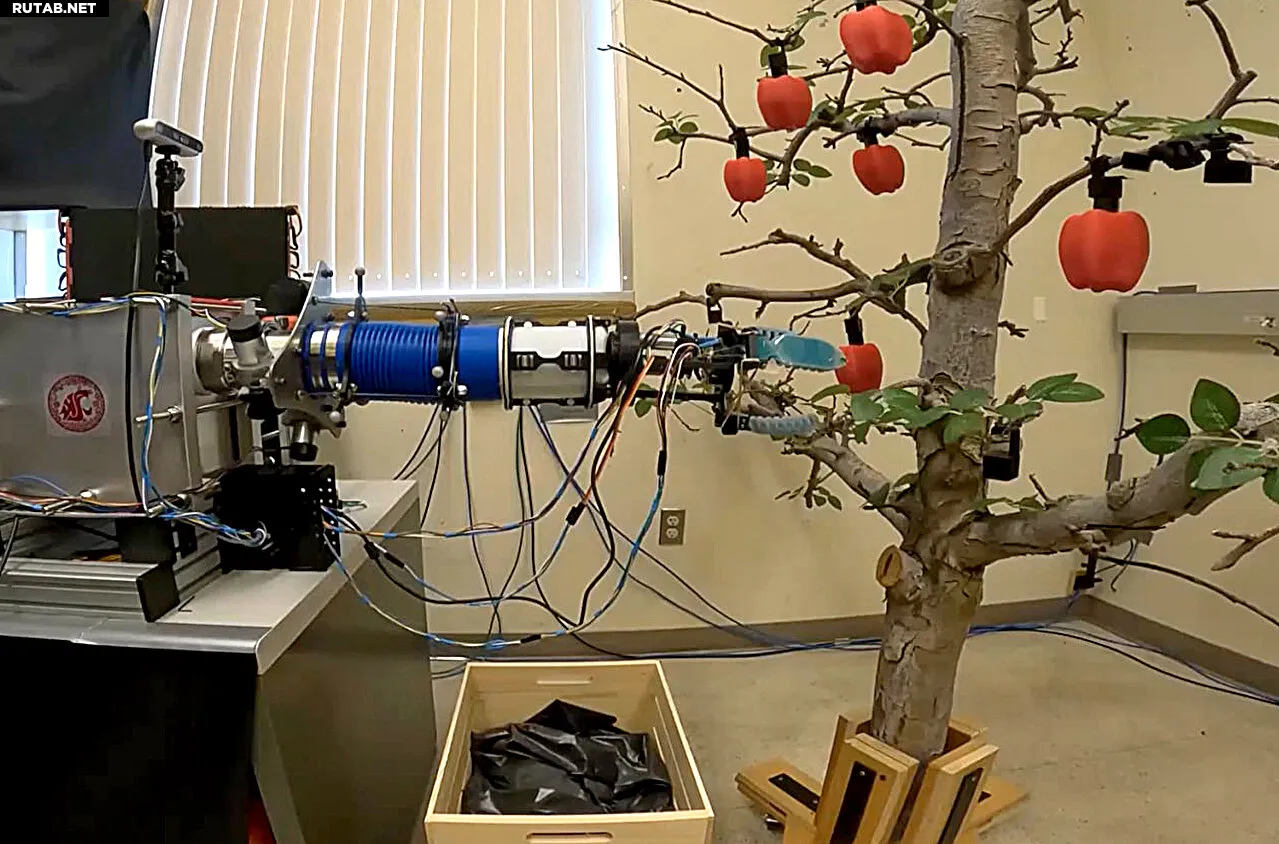
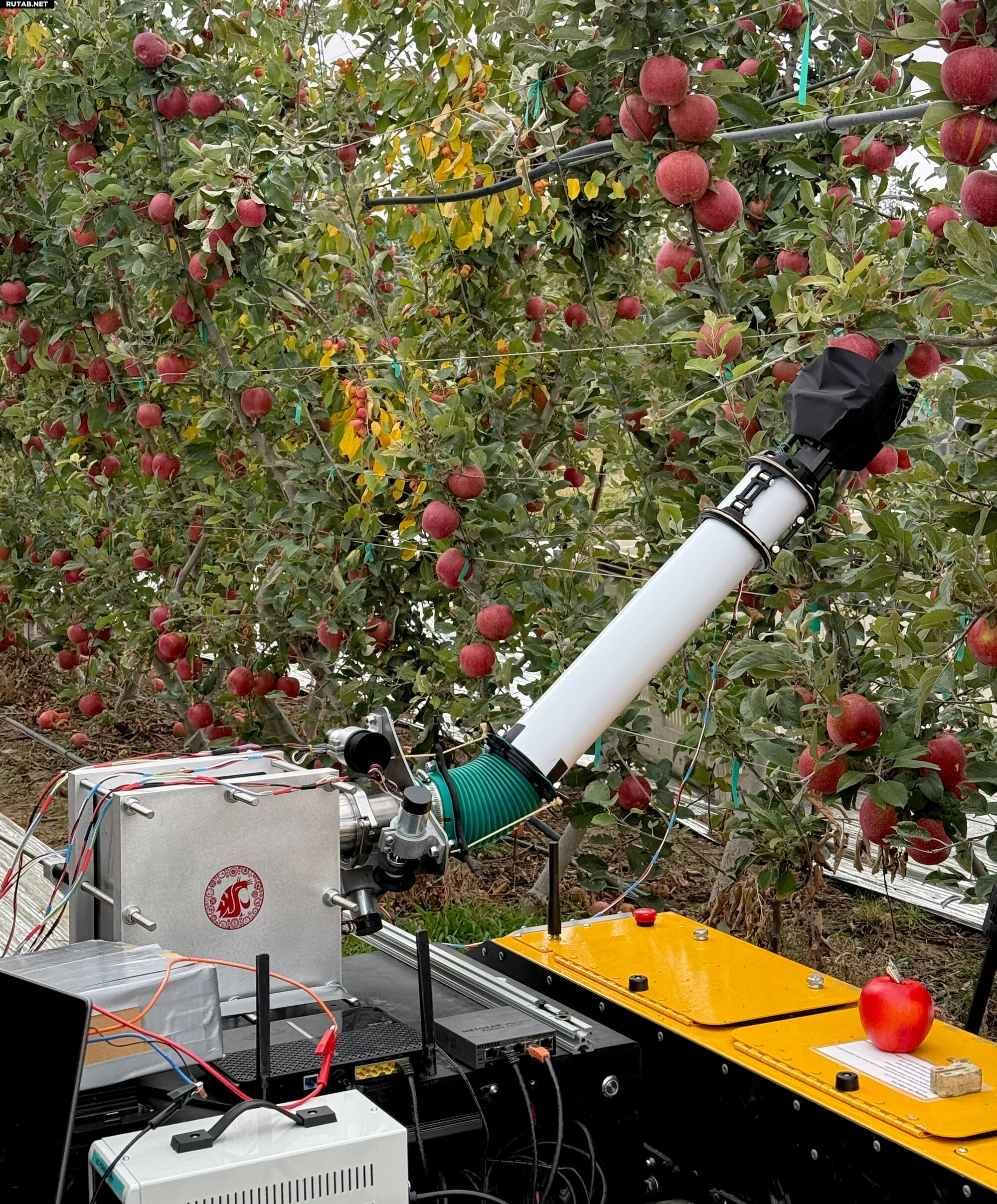
Надувная рука способна обнаружить яблоко, затем вытянуться и сократиться, чтобы сорвать плод примерно за 25 секунд. Весящая вместе с металлическим основанием менее 23 кг, двухфутовая (около 60 см) рука сделана из мягкой ткани, заполненной воздухом. Её конструкция отдалённо напоминает рекламные «танцующие» фигуры, но она прочнее. Результаты работы команды из Школы машиностроения и материаловедения WSU недавно были опубликованы в журнале Smart Agricultural Technology.
Команда сотрудничает с исследователями из Исследовательского центра в Проссере и с Маноем Карки из Корнеллского университета, чтобы адаптировать руку для автоматизированной движущейся платформы, которая также разрабатывается для перемещения по садам.
«Несложная природа конструкции делает её недорогой, простой в обслуживании и очень надёжной для мягкого робота», — сказал Мин Луо, доцент Школы машиностроения и материаловедения WSU и автор работы.
Дефицит рабочей силы стимулирует исследования
Производители фруктов во всём мире сталкиваются с нехваткой рабочей силы для критически важных операций, таких как сбор урожая и обрезка. Штат Вашингтон лидирует в США по производству яблок и сладкой вишни, что в 2023 году внесло более 2 миллиардов долларов (около 160 млрд рублей) в ВВП страны.
Старение населения и сокращение числа мигрантов-сельхозработников привели к тому, что фермерам стало сложно нанимать достаточно людей в сезон сбора урожая. Мин Луо, путешествуя по штату осенью, видел сады с плодами, гниющими на земле. «Это просто расточительство», — отметил он.
Преимущества и будущие улучшения
Материалы для разработанной командой WSU руки стоят около 5500 долларов (около 440 000 рублей). Поскольку рука представляет собой надутую трубку, она мало весит, что делает её безопасной для использования рядом с людьми и не причиняет вреда хрупким веткам или яблокам. Она также предназначена для работы в современных садах, где ветви организованы линейно или в виде V-шпалеры.
«Наличие этой очень недорогой, безопасной роботизированной платформы идеально подходит для садовой среды», — сказал Райан Дорош, аспирант и ведущий автор работы.
По сравнению с человеком, собирающим яблоко каждые три секунды, роботизированная рука всё ещё медлительна. Исследователи совершенствуют некоторые механические компоненты, а также работают над улучшением её простой системы обнаружения, которая замедляет сбор больше, чем движение руки. Они также работают над тем, чтобы рука могла выполнять другие задачи в саду, такие как обрезка, прореживание цветов и опрыскивание.
Создавая экономичное решение и наделяя руку-робота способностью выполнять несколько задач, исследователи надеются, что фермеры в конечном итоге смогут покупать несколько недорогих роботов.
Больше информации: Ryan Dorosh et al, An everting inflatable fabric manipulator (EIFM) designed for apple picking, Smart Agricultural Technology (2026). DOI: 10.1016/j.atech.2025.101635
Источник: Washington State University
ИИ: Разработка выглядит многообещающе, особенно с учётом глобальной проблемы нехватки рабочих рук в сельском хозяйстве. Ключевыми преимуществами являются низкая стоимость, безопасность и потенциальная многофункциональность. Однако, чтобы стать реальной альтернативой человеческому труду, системе потребуется серьёзно нарастить скорость работы и точность обнаружения плодов. В 2026 году такие «мягкие» роботы могут стать важным шагом к частичной автоматизации трудоёмких процессов в агросекторе.
0 комментариев