Китай представил подводного бурового робота для глубоководной разведки
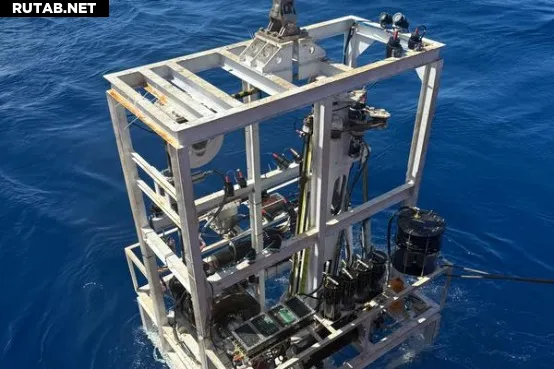
Первый в Китае отечественный подводный робот, способный к трёхмерному бурению и мониторингу на месте в морских пластах, успешно завершил пробную операцию в Южно-Китайском море на глубине 1264 метра.
Как сообщила в среду Гуанчжоуская служба морской геологической разведки (GMGS), робот, разработанный под её руководством в рамках Китайской геологической службы, достиг всех целевых показателей во время недавней миссии. Это знаменует собой значительный прорыв в возможностях страны по глубоководным исследованиям и мониторингу пластов на месте.
«Он может свободно бурить и точно позиционировать себя внутри глубоководных формаций, автономно избегая препятствий, таких как камни и биологические остатки, при этом динамически планируя оптимальные пути», — сказал Чжу Янтао, инженер GMGS и заместитель руководителя проекта по созданию робота.
«Оснащённый множеством датчиков, он также может проводить долгосрочный, широкомасштабный, многопараметрический мониторинг на месте глубоко внутри пластов», — добавил он.
Во время испытаний роботизированная система провела мониторинг целевых морских пластов в реальном времени, собрав более 2000 наборов данных о концентрации метана, растворённом кислороде и структуре пласта.
«Полученные данные помогут нам лучше понять геологические условия тестовой зоны добычи», — отметил Чжу.
Глубоководные пласты содержат важные ресурсы, такие как газовые гидраты, глубоководные редкоземельные элементы и полиметаллические конкреции. Их безопасное и устойчивое развитие имеет жизненно важное значение для национальной энергетической и ресурсной безопасности. Однако разведке мешают экстремальные условия, включая низкие температуры, высокую солёность, огромное давление и геологическую нестабильность.
Как пояснил Чжу, существующие технологии глубоководного бурения и мониторинга часто страдают от недостаточной мобильности, недостаточного пространственного и временного охвата для наблюдений на месте, а также от проблем с передачей данных в реальном времени.
Эти недостатки мешали отрасли проводить малоинвазивный, реальный мониторинг на месте внутри морских пластов, спрос на который растёт в связи с освоением глубоководных ресурсов.
Чтобы устранить эти пробелы, исследовательская группа GMGS самостоятельно разработала ключевые технологии и создала робота. Он использует модульную многосекционную конструкцию и объединяет инерциальную навигацию, позиционирование с помощью магнитных маяков и алгоритмы искусственного интеллекта, что значительно повышает его интеллект и адаптивность к окружающей среде.
В перспективе команда планирует дальнейшее улучшение общей производительности робота для адаптации к более сложным рабочим условиям. Ожидается, что он будет задействован в разведке и разработке глубоководных ресурсов, включая газогидраты, редкоземельные элементы и полиметаллические конкреции.
Робот также будет поддерживать китайские проекты глубоководного научного бурения, предоставляя ключевую технологическую поддержку национальной стратегии глубоководной науки и строительства мощной морской державы, отметил Чжу.



0 комментариев