Учёные выложили в открытый доступ проект 3D-печатаемой «eFlesh» для роботов
Материал для 3D-печати с мрачноватым названием «eFlesh» (электронная плоть) создан для решения очень практичной задачи — он помогает роботизированным сенсорам и захватам эффективно работать с самыми разными объектами в неструктурированной среде. Благодаря работе и щедрости исследователей, любой желающий может скачать и напечатать этот материал самостоятельно. Группа учёных из Нью-Йоркского университета продемонстрировала eFlesh в действии: материал реагирует на прикосновения, а также надёжно, но бережно захватывает и манипулирует такими объектами, как (предположительно сырые) яйца, USB-устройства и пушистые мягкие игрушки. Более того, учёные поделились деталями изготовления, 3D-файлами, обученными моделями и кодом, чтобы каждый мог создать собственные устройства на основе eFlesh.
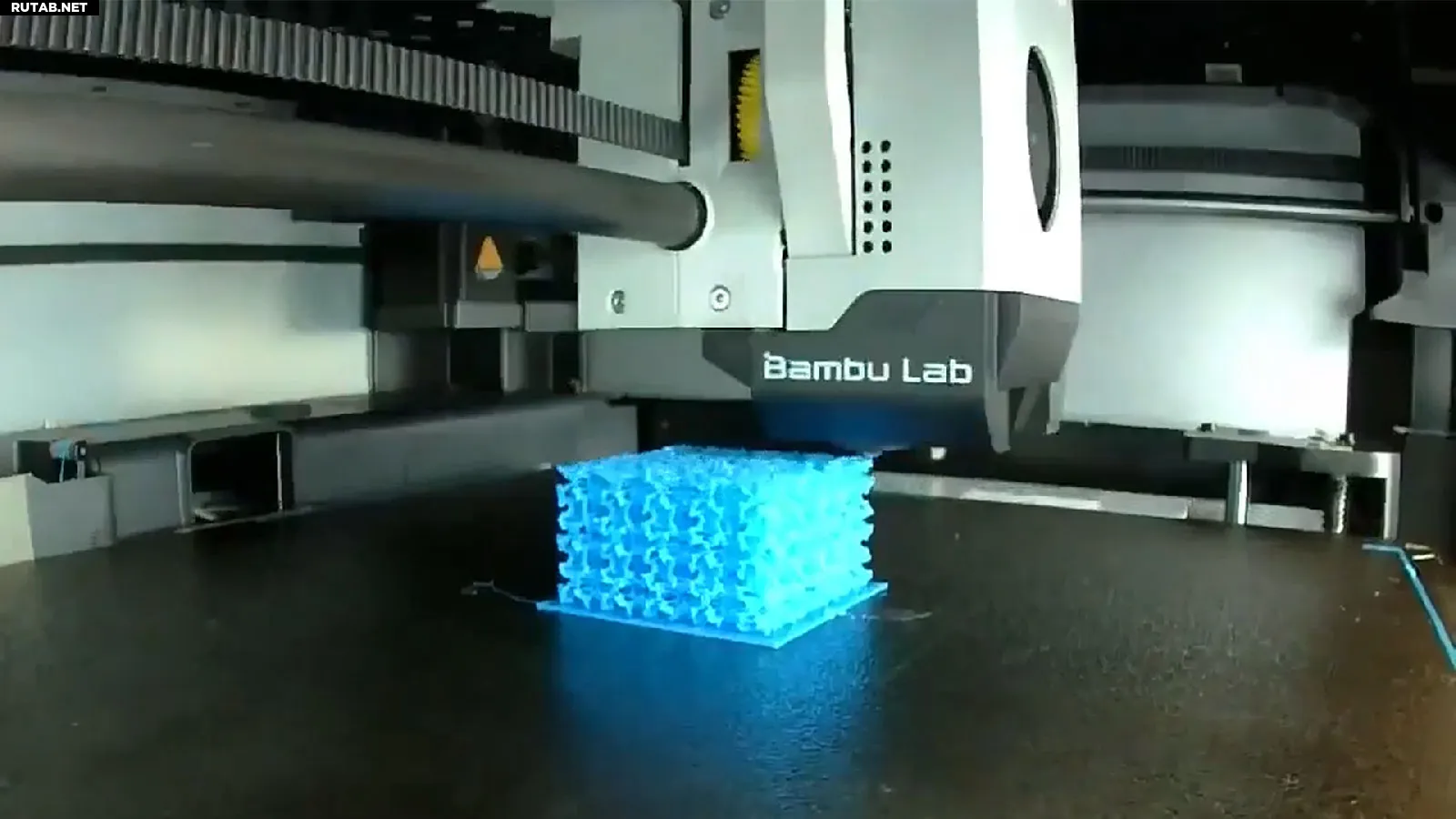
На видео выше видно, что eFlesh печатается быстро и просто. Знатоки 3D-печати заметят, что для примера с квадратным сенсорным захватом учёные использовали принтер Bambu Lab X1E. На других роликах показано, что процесс печати из TPU-филамента приостанавливался на высоте примерно 1,3 см от стола для вставки сетки магнитов — ключевого элемента для сенсорной функциональности.
Изображение: e-flesh.com
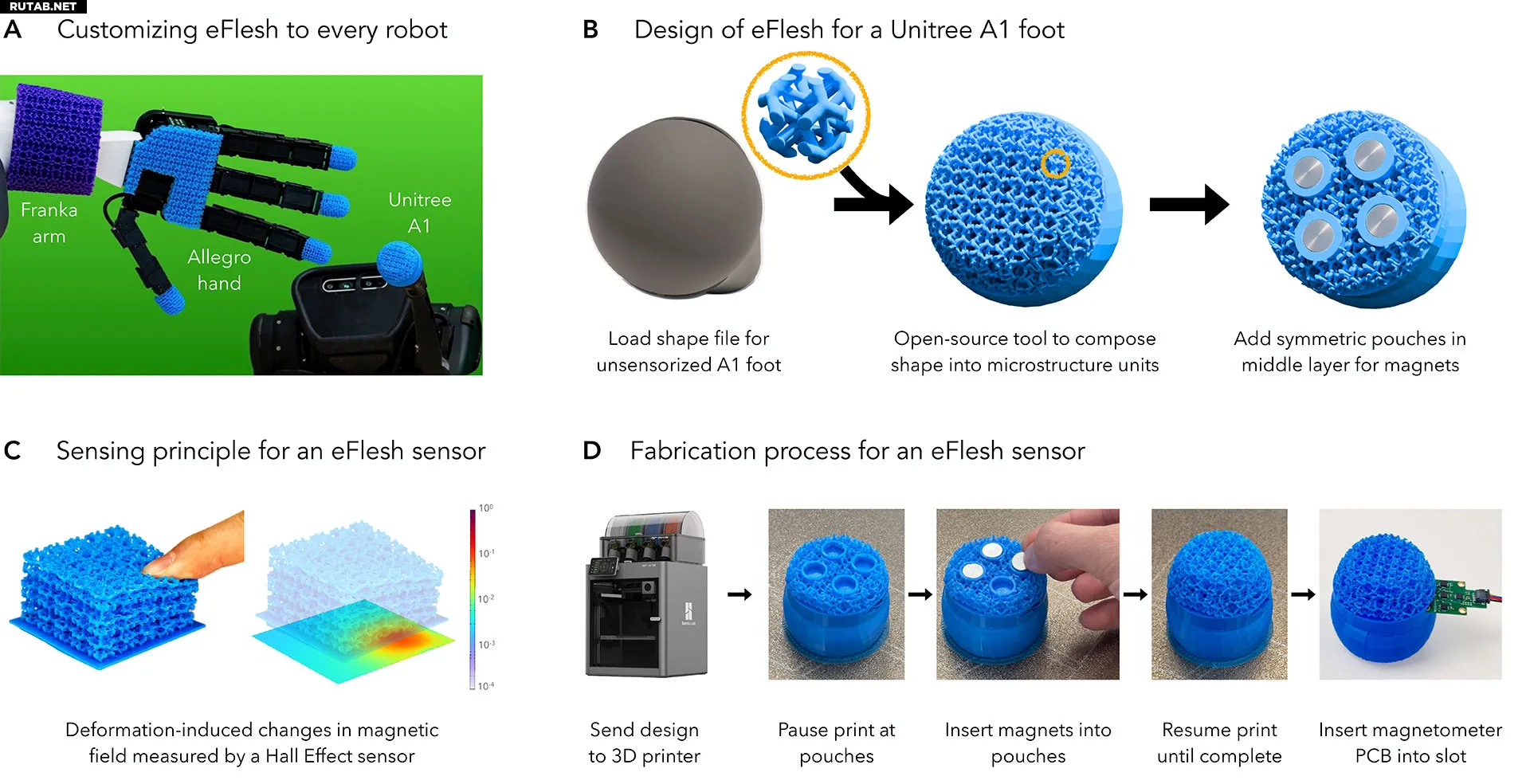
Авторы разработки заявляют: «Для создания сенсора eFlesh требуется всего четыре компонента: любительский 3D-принтер, стандартные магниты (стоимостью менее 5 долларов, ~400 рублей), простая CAD-модель нужной формы и плата с магнитометром». Они решили обеспечить широкую доступность этой технологии, выпустив открытый дизайн, включая 3D-модели в формате STL и вспомогательный программный код. Доступен даже инструмент для конвертации CAD-моделей в STL-файлы для eFlesh.
Задача надёжного сенсорного восприятия, перемещения и манипулирования хрупкими или объектами неправильной формы долгое время была головной болью для инженеров. То, что это решение является доступным, а также, по утверждениям, дешёвым и эффективным, делает его вдвойне привлекательным. В частности, учёные из Нью-Йоркского университета заявляют, что eFlesh обеспечивает «точность локализации контакта 0,5 мм, с ошибкой прогнозирования силы 0,27 Н по оси Z и 0,12 Н в плоскости X/Y».

Изображение: e-flesh.com
Изображение: e-flesh.com
За интеллектуальную функциональность отвечает «модель обнаружения проскальзывания на основе машинного обучения, которая обобщается на незнакомые объекты с точностью 95%». Разработчики eFlesh также утверждают, что их «визоотактильные алгоритмы управления повышают эффективность манипуляций на 40% по сравнению с базовыми системами, использующими только компьютерное зрение». Эта умная функциональность демонстрируется в таких точных задачах, как вставка вилки роботизированной рукой или проведение банковской карты.
Таким образом, эти учёные, возможно, только что демократизировали тактильное восприятие и манипуляции для робототехники. Жаль только, что название у технологии такое.
Источник: Tomshardware.com
0 комментариев