Исследования проливают свет на использование нескольких CubeSat для обслуживания и ремонта в космосе
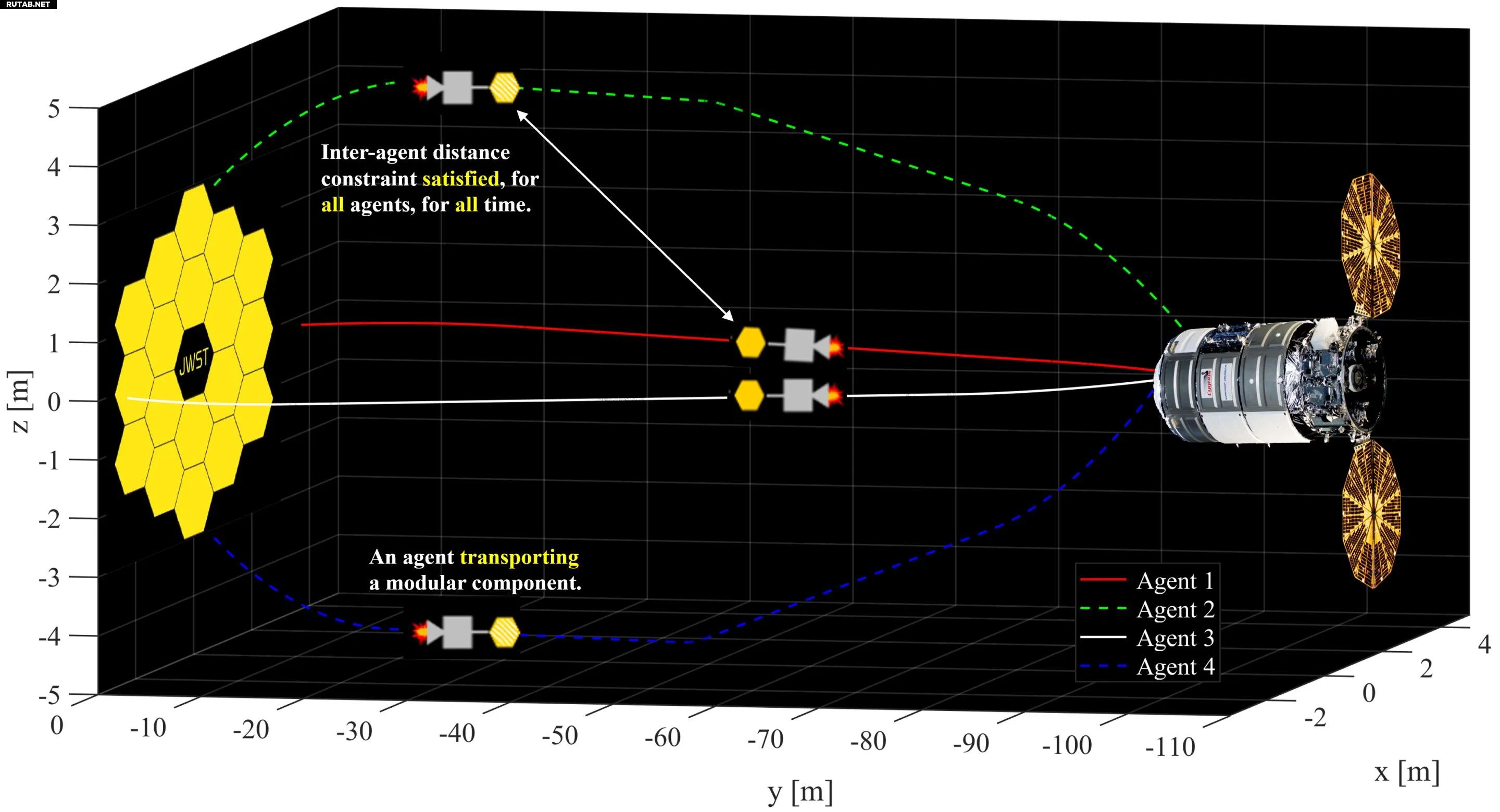
Оптимальные по топливу траектории четырех агентов обслуживания, транспортирующих модульные компоненты между служебным транспортным средством и целевым космическим аппаратом, удовлетворяя ограничениям по предотвращению столкновений. Автор: The Journal of the Astronautical Sciences (2024). DOI: 10.1007/s40295-024-00470-7
Поскольку все больше спутников, телескопов и других космических аппаратов строятся с возможностью ремонта, для сервисных космических аппаратов потребуются надежные траектории, чтобы безопасно добраться до них. Исследователи из Департамента аэрокосмической техники в Инженерном колледже Грейнджера, Университет Иллинойса в Урбане-Шампейне разрабатывают методологию, которая позволит нескольким CubeSat действовать в качестве сервисных агентов для сборки или ремонта космического телескопа.
Их метод, опубликованный в журнале The Journal of the Astronautical Sciences, минимизирует расход топлива, гарантирует, что обслуживающие агенты никогда не будут приближаться друг к другу ближе, чем на 5 метров, и может использоваться для решения задач по управлению траекторией, не связанных с космосом.
«Мы разработали схему, которая позволяет CubeSats работать эффективно, не сталкиваясь», — сказал аспирант аэрокосмического факультета Рутвик Боммена. «Эти небольшие космические аппараты имеют ограниченные возможности бортовых вычислений, поэтому эти траектории предварительно рассчитываются инженерами-проектировщиками миссии».
Боммена и его научный руководитель Робин Вуллендс продемонстрировали эффективность алгоритма, смоделировав два, три или четыре роя транспортных средств, одновременно транспортирующих модульные компоненты между служебным транспортным средством и космическим телескопом, проходящим техническое обслуживание в космосе.
«Эти траектории сложно вычислить и рассчитать, но мы придумали новую методику, которая гарантирует их оптимальность», — сказал Боммена.
Боммена сказал, что самым сложным аспектом является масштаб расстояний. Орбита космического телескопа Джеймса Уэбба находится примерно в 1,5 миллионах километров, в точке Лагранжа 2 системы Солнце-Земля. Это место, где гравитационные силы Солнца и Земли уравновешивают друг друга, что делает его идеальным местом в космосе для спутников наблюдения за дальним космосом, чтобы поддерживать орбиту, будучи обращенными в сторону от Солнца.
«Не вдаваясь в технические подробности, мы использовали косвенные методы оптимизации, чтобы гарантировать, что выходное решение является оптимальным с точки зрения расхода топлива. Прямые методы этого не гарантируют».
«Мы также включили ограничения неравенства траектории, препятствующие столкновениям, в формулу оптимального управления в качестве жесткого ограничения, чтобы космический аппарат не нарушал ограничение ни в одной точке траектории».
Боммена объяснил, что традиционные прямые или косвенные методы с ограничениями, такими как предотвращение столкновений, разбивают траекторию на несколько дуг, увеличивая сложность экспоненциально.
«Наша методология позволяет решать траектории как отдельные дуги. Мы просто движемся от начальной точки напрямую к конечной точке. Это более оптимально с точки зрения расхода топлива и более эффективно с точки зрения вычислений».
Другим важным результатом исследования является разработка новой динамической модели круговой ограниченной задачи трех тел относительно цели.
«Нам нужно было смягчить численные проблемы, возникающие из-за большого расстояния между Солнцем и Землей», — сказал Боммена. «Чтобы сделать это, мы сначала сместили центр кадра по оси x от барицентра Солнце-Земля к местоположению точки Лагранжа L2, а затем вывели уравнения движения относительно целевого космического корабля. Мы также ввели новую единицу измерения расстояния, применив масштабный коэффициент, который пропорционально корректируется по отношению к исходному измерению расстояния».
Боммена сказал, что он и Вулландс работали над этим проектом около полутора лет. Его прорыв произошел во время дальнего перелета.
«Математика работала на бумаге. Главной проблемой, с которой мы столкнулись, была борьба с числами. Я кодировал во время долгого полета. Я попробовал пару вещей, и внезапно решение сошлось. Сначала я не поверил. Это был очень волнующий момент, и следующие несколько дней были потрясающими».
Боммена отметил, что, хотя целью данной работы является повышение безопасности и эффективности обслуживания и сборки в космосе, разработанная ими методология весьма универсальна и может использоваться в других сценариях оптимизации траектории с различными ограничениями.
Больше информации: Ruthvik Bommena et al, Indirect Trajectory Optimization with Path Constraints for Multi-Agent Proximity Operations, The Journal of the Astronautical Sciences (2024). DOI: 10.1007/s40295-024-00470-7




0 комментариев